GIMATIC Iberia presenta los Sistemas Anticolisión y de Corrección de Alineamiento para robots y manipuladores de RAD
- Publicado el 13 de Junio de 2019
GIMATIC es una innovadora compañía italiana, con una experiencia acumulada de más de 30 años en la fabricación y venta de componentes para la construcción de sistemas de montaje y ensamblado automatizado, acorde a los objetivos fijados por la Industria 4.0 con la puesta en marcha fábricas inteligentes (“Smart factories”) capaces de adaptarse a las necesidades, procesos de producción, así como una asignación más eficiente de recursos.
En la península Ibérica trabajamos con el objetivo de ser su referente técnico y profesional conjugamos ambición, honestidad, profesionalidad con una gran orientación al Cliente y al mejor servicio. GIMATIC Iberia, representación en España y Portugal del grupo GIMATIC, amplía su gama de soluciones dedicadas a la muñeca del manipulador con sistemas Anticolisión y sistemas de corrección de Alineamiento gracias al acuerdo alcanzado con RAD, firma americana especializada en herramientas de fin de brazo.

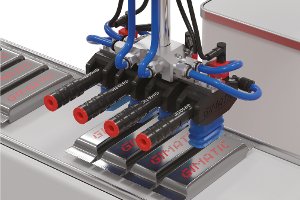
Los sensores Anticolisión de RAD permiten proteger la herramienta EOAT y el producto manipulado en caso de colisión del manipulador. El sensor, integrado entre la muñeca del manipulador y la herramienta EOAT, permite detectar cualquier colisión (incluso con el robot parado) y manda la información al manipulador en un plazo de 2 a 10ms. Pero para proteger eficazmente la herramienta y la célula robotizada, el sensor anticolisión cuenta con un sistema de compliance integrado que permite dejar a la herramienta los últimos grados de libertad que necesita para absorber la energía del choque y no dañarse.
El nivel de fuerza aplicable necesaria para que el sensor detecte una colisión es ajustable y se puede reiniciar fácilmente. Los sistemas de Corrección de Alineamiento (Compliance Device) de RAD, permiten añadir un grado de libertad adicional a la muñeca del robot en ángulo, compresión y rotación para permitir al manipulador compensar mecánicamente desalineaciones o errores de posicionamiento del producto a manipular/operar.
Esta función permite ahorros importantes en la programación del manipulador y mas flexibilidad en la producción, sobretodo en aplicaciones donde no se tiene mucha precisión en el posicionamiento de la pieza a trabajar.